A partir de la experiencia del equilibrio de fuerzas elaborado previamente, y apoyados en el modelo de tensegridad presentado, realizar un modelo igual analizando como actúan las fuerzas (tensión y compresión) sobre los postes y tensores del modelo descrito.
https://www.dropbox.com/s/i8w4c4pkpg2tm66/Tensegridad.docx
TENSEGRIDAD
Las estructuras tensegríticas son realmente asombrosas: constan de barras
que están flotando en el aire, tan sólo sujetas mediante cables a otras barras
que, curiosamente, también flotan en el aire. Quizás sea precisamente esto lo
que a la gente le entusiasma de la Tensegridad, contemplar este fenómeno
"mágico" que son incapaces de entender.
Esta comunicación sirve de introducción a estos sistemas de “compresión
flotante”: indaga en su controvertido origen y autoría, profundiza en sus
fundamentos físicos y estructurales, clasifica y ordena los diferentes tipos de
tensegridades, analiza su presencia en la naturaleza, la ciencia y el arte y
finalmente aborda sus actuales y futuras aplicaciones en ingeniería y
arquitectura. En definitiva, pretende ser una guía que oriente en este nuevo mundo
que se abre camino.
Palabras Clave: Tensegridad, tensegrity, estructuras,
tensión, compresión, pretensado, cable, barra, Snelson, Fuller.
¿Qué es la Tensegridad?
La definición del término Tensegridad es esencial para todas las futuras
consideraciones que se harán a lo largo de esta obra, o de cualquier trabajo
que trate sobre ella. Que una estructura sea considerada como tensegridad o no,
es algo que depende directamente de la definición aceptada de entre todas las
emitidas durante los últimos 50 años. De hecho, desde hace dos décadas,
infinidad de estructuras, sistemas y fenómenos naturales han sido denominados
empleando este vocablo, cuando realmente no lo eran ni se le acercaban.
Diversas definiciones han sido establecidas por diferentes especialistas en
la materia. El autor [1], en un intento de explicar clara pero detalladamente
lo que denota la palabra “tensegridad”, sugiere definirla así:
La Tensegridad es un principio estructural
basado en el empleo de componentes aislados comprimidos que se encuentran
dentro de una red tensada continua, de tal modo que los miembros comprimidos
(generalmente barras) no se tocan entre sí y están unidos únicamente por medio
de componentes traccionados (habitualmente cables) que son los que delimitan
espacialmente dicho sistema.
En todo caso, el mejor modo para entender lo que es y cómo funciona un
sistema tensegrítico es examinando un modelo o, mejor, construyéndolo.
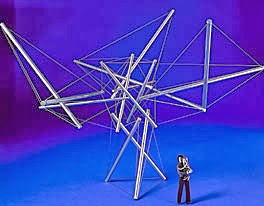
Aunque mostrar estas construcciones de modo gráfico no sea tan ilustrativo,
pues no permite analizar su geometría tridimensional, palparlos o deformarlos y
ver su reacción, la figura 1 muestra una escultura realmente espectacular y
sorprendente de Kenneth Snelson [2], uno de los padres de la compresión flotante,
como él lo llamaría. Las barras están flotando en el aire, tan sólo sujetas
mediante cables a otras barras... ¡que también flotan en el aire! No existe un
soporte sólido y rígido que las vaya apuntalando; ese puñado de varillas y
tendones, aparentemente caótico, conforma una viga en voladizo que da la
sensación de que se va a caer en cualquier momento, a la primera ráfaga de
viento.
Quizás sea precisamente esto
lo que a la gente le entusiasma de la Tensegridad, contemplar este fenómeno
"mágico" que son incapaces de entender.
Origen e Historia: La controversia
Probablemente, lo más conocido de la Tensegridad no sean sus fundamentos
técnicos ni su potencial funcionalidad, sino la controversia generada en torno
a su origen y, más concretamente, a la autoría de su descubrimiento.
Tres hombres han sido considerados los inventores de la Tensegridad:
Richard Buckminster Fuller, David Georges Emmerich y Kenneth D. Snelson. Aunque
todos ellos han clamado para sí el privilegio de ser el primer descubridor, el
segundo de ellos, Emmerich (Debrecen, Hungría, 1925-1996) evidenció que el
primer prototipo de sistema tensegrítico, denominado
“Gleichgewichtkonstruktion”, fue creado por Karl Ioganson en 1920.
Durante el verano de 1948, Fuller trabajó como profesor, sustituyendo a
otro docente que hubo de ausentarse, en el Black Mountain College (Carolina del
Norte, EEUU); aunque no muy conocido por entonces, era un carismático y
peculiar inconformista que ejercía de arquitecto, ingeniero, matemático,
cosmólogo, poeta e inventor (registrando 25 patentes a lo largo de su vida).
Por su parte, Snelson era por aquella época un estudiante de artes plásticas de
la Universidad de Oregón, que por diversas circunstancias atendió las clases de
modelos geométricos impartidas por Fuller. Tal y como él mismo reconoce 40 años
después, mortificándose por ello en cierto modo, Snelson quedó prendado de lo
que aprendió en aquellas clases y por eso, profundamente influido por dichas
enseñanzas, durante el siguiente otoño comenzó a estudiar diversos modelos
tridimensionales. Como resultado, creó esculturas de diversas índoles bajo la
influencia de Calder, Albers y Fuller, que fueron evolucionando progresivamente
hasta que finalmente acabaron generando un nuevo tipo de estructura hasta
entonces nunca concebida. En sus propias palabras, “elementos sólidos
fijados entre sí en el espacio, sustentados uno con el otro únicamente por
medio de miembros en tracción. Estaba bastante impresionado con lo que había
realizado”.
Cuando al verano siguiente le mostró su trabajo a Fuller para preguntarle
por su opinión, éste se dio cuenta de que tenía ante sus ojos la respuesta a la
pregunta que se había estado planteando durante largo tiempo. En palabras del
profesor: “Durante 21 años, antes de conocer a Kenneth Snelson, yo había
estado indagando en los conceptos de la Tensegridad (...). A pesar de mi
descubrimiento, designación y desarrollo tanto de la geometría vectorial
multidimensional como de la Tensegridad tridimensional, había sido incapaz de
integrar ambas y así descubrir la Tensegridad multidimensional de cuatro, cinco
y seis ejes de simetría.” (Fuller, 1961)
Al mismo tiempo, pero independientemente, David Georges Emmerich,
probablemente inspirado en la estructura de Ioganson antes mencionada, empezó a
investigar diferentes tipos de estructuras basadas en prismas tensados y
sistemas tensegríticos más complejos, que él denominaría "structures
tendues et autotendants", o estructuras tensadas y auto-pretensadas. Como
resultado, definió y patentó sus “redes auto-pretensadas”, que eran exactamente
la misma clase de esculturas sobre las que estaban trabajando Snelson y Fuller
al otro lado del Atlántico.
Incluso aunque al principio Fuller mencionara a Snelson como el autor del
descubrimiento, después de un tiempo empezó a hacer referencia al mismo como
“mi Tensegridad”. De hecho, Tensegrity es un término que él mismo acuñó en 1955
como contracción de “Tensional Integrity” (Integridad Tensional), de modo que
aludiendo a ello con el nombre que él eligió, insinuaría sutilmente al mundo
que el invento era suyo. “Crear este extraño nombre era su estrategia para
apropiarse de la idea como si fuera suya”, cita Snelson en varias
ocasiones.Obviamente, su pupilo se quedó bastante desconcertado. A finales de
1949, Fuller escribió a Snelson comentándole que su nombre pasaría a los anales
de la historia, pero algunos años más tarde cambiaría de opinión, insinuando a
su alumno que se mantuviera en el anonimato durante algún tiempo más. En esta
tesitura, Snelson se vio empujado a insistir en que se reconociera su esencial
aportación, lo que consiguió durante la exposición de algunas de las obras de
Fuller instalada en el Museo de Arte Moderno de Nueva York (MOMA) en 1959. Así
pues, por fin se dio crédito públicamente a su contribución respecto al
nacimiento de la Tensegridad.
Un par de años más tarde, Fuller se referiría de nuevo a Snelson en los
siguientes términos: “(...) en un momento importante, durante mi exploración
de las estructuras de compresión-discontinua tensión-continua, mi colega
Kenneth Snelson aportó una ayuda intuitiva extraordinaria, y por ello debe ser
oficialmente mencionado en el discurso formal de mis ideas sobre el
descubrimiento de la Tensegridad.”
¿Quién inventó la Tensegridad? ¿O quién la descubrió? Resulta evidente que
la respuesta no es tan evidente. Al autor se le ocurre, sin ánimo de ser
original en sus afirmaciones, que fue la sinergia (término empleado muy
frecuentemente por Fuller) generada por la suma de esfuerzos del profesor y el
estudiante lo que propició el origen de la Tensegridad. Para zanjar el asunto,
se podría considerar que la invención de las tensegridades corresponde a
Kenneth Snelson mientras que el descubrimiento de la Tensegridad se debió a
Buckminster Fuller.
Definiciones y Principios Básicos
Durante muchos años, algunos
autores han estado buscando una “definición definitiva” de Tensegridad que no
sea ambigua y pueda ser aceptada por toda la comunidad científica. Es esencial
especificar de un modo preciso lo que es una estructura tensegrítica porque,
dependiendo de lo que se entienda por ello, una misma estructura podría ser
considerada como un verdadero o falso ejemplo de este tipo de construcciones.
Definiciones.
Las primeras disquisiciones sobre la Tensegridad, ya citadas en los
capítulos precedentes, fueron dadas por los propios autores de las patentes
intentando explicar lo que habían descubierto.
En su artículo “Tensegrity” [3], Buckminster Fuller explicaba profusamente
los principios y conceptos básicos que gobernaban los sistemas
“tensionales-integrales”, pero no consiguió dar una definición concisa de los
mismos. No obstante, también empleó una breve frase que desde entonces ha
pasado a los anales de la historia de la Tensegridad: “Los elementos en
compresión devienen pequeñas islas en un mar de tensión” (ibid). Algunos
años más tarde, da otra explicación más extensa en su libro “Synergetics” [4]:
“La Tensegridad define un principio de relación estructural en el
Fig.2. Representaciones enantiomórficas del
“Símplex”: dextrorso y sinistrorso.
Quizás fue Kenneth Snelson, el tercero en discordia y el primero en
construir el “Simplex” (fig. 2), el más claro a la hora de enunciar una
definición. Aunque prefiriera evitar el término tensegridades, acuñado por
Fuller, y aludir a ellas como “estructuras de compresión flotante”, las
describe como sigue: “La Tensegridad describe un sistema estructural cerrado
compuesto por un conjunto de tres o más barras comprimidas dentro de una red de
tendones atirantados, estando ambas partes mutuamente combinadas de tal suerte
que las barras no se tocan entre sí pero empujan de dentro hacia
cuál la forma de la estructura está
garantizada por el continuo y finitamente cerrado comportamiento de los
elementos traccionados del sistema y no por el discontinuo y localizado
comportamiento de sus elementos comprimidos.” (Fuller, 1975b, 700.011)
Otro de los “padres” de la Tensegridad, David G. Emmerich, expuso en su
patente que la invención podría ser descrita de un modo no restrictivo, es
decir, mediante el uso de ejemplos, algunos de los cuales fueron incluidos
gráficamente en dicho documento. De este modo, evitaba la difícil tarea de dar
una definición concisa al respecto.fuera contra los nudos de dicha red
atirantada para así formar una firme, triangulada y pretensada unidad de
tensión y compresión.”
Algunos años más tarde, Anthony Pugh [5] describió la Tensegridad de forma
bastante sintética y precisa, siendo su definición aceptada casi universalmente
por el resto de especialistas por su correcta y clara constitución,
probablemente la primera de su clase: “Un sistema tensegrítico se establece
cuando un conjunto discontinuo de componentes sometidos a compresión interactúa
con un conjunto continuo de elementos sometidos a tracción definiendo un
volumen estable en el espacio.” (Pugh, 1976, p.3).
Por último, René Motro [6] se
propuso distinguir dos conceptos bien diferentes. Este ingeniero francés hizo
la distinción entre la definición “basada en las patentes” y la definición
“extendida”. Esta última tiene algunos puntos en común con la que diera Anthony
Pugh, pero añade otros matices: los elementos comprimidos se encuentran dentro
de la continua red atirantada y el sistema es estable por sí mismo, lo que
permite que esté en equilibrio independientemente de reacciones externas. Como
resultado, René Motro explica lo siguiente: “Un sistema tensegrítico es un
sistema que está en equilibrio, es estable por sí mismo y comprende un conjunto
discontinuo de componentes comprimidos dentro de un conjunto continuo de
componentes atirantados.”
Características Generales
Si considerásemos a esta última enunciación como suficientemente clara y
concisa, sería posible hacer la distinción entre verdaderas y falsas
tensegridades, dadas sus características. Resulta de interés desgranar uno a
uno los conceptos englobados en dicha descripción, tal y como su autor sugiere:
En equilibrio y estable por sí mismo: Equilibrio estable porque el sistema
puede recuperar su posición original después de que alguna acción externa lo
haya alejado de ella; y por sí mismo porque dicho equilibrio es independiente
de cualquier condición ajena al mismo, no depende de fuerzas externas, ni
siquiera de la gravedad o de anclaje alguno, debido a su estado de pretensado
inicial. Es estable incluso en el espacio fuera de la atmósfera.
Componentes: este término se opone al de “elemento”, empleado en otras
definiciones, ya que igual que generalmente se trata de una barra o un cable,
también puede hacer referencia a una membrana, un volumen de aire, un átomo o
un ensamblaje de componentes más elementales.
Comprimidos o traccionados: en lugar de comprimidos y traccionados,
porque la clave está en que cada componente, en su totalidad, ha de trabajar a
compresión o a tracción, no a ambas a la vez o de forma mixta (como
podría ser considerada la flexión).
Tensión continua y compresión discontinua: ya que, como se ha comentado,
los componentes comprimidos han de estar aislados entre sí, mientras que los
que están sometidos a tracción crean un “océano” de tensión sin discontinuidad
entre nudos.
Dentro: Este es un concepto crucial puesto que permitirá diferenciar entre
dos tipos de estructuras básicas: Motro establece que un sistema es
tensegrítico cuando todos sus componentes comprimidos están dentro del propio
sistema, es decir, cuando los componentes que conforman sus bordes exteriores
están sometidos a tracción.
Esta última característica es
vital puesto que es lo que nos permite, por ejemplo, considerar a la cubierta
más grande del mundo, la “Georgia Dome” en Atlanta como una pura o como una
falsa tensegridad. Algunos puristas no consideran que sea tensegrítica dado que
está anclada a un anillo de compresión alrededor del entramado de cables y
barras y que, consecuentemente, su contorno no está traccionado. Así pues,
según esta opinión, estaría incluida más apropiadamente en el ámbito de las
estructuras pretensadas, como una “cubierta de barras y cables” más que como
una “cubierta tensegrítica”.
Propiedades.
Las tensegridades destacan por su ligereza en
comparación a otras estructuras de similar resistencia o, si se prefiere,
tienen una gran capacidad portante si se comparan a otras estructuras de peso
análogo.
␣ No existen elementos redundantes, puesto que cualquier
nuevo tendón añadido a la estructura sirve para conferirle de mayor rigidez.
␣ Como ya se ha dicho, no dependen de la gravedad gracias a
su auto-equilibrio, luego no requieren de ningún anclaje o fijación para
mantener su forma o geometría. Son, pues, sistemas estables en cualquier
posición.
␣ La mayoría de los sistemas tensegríticos son
enantiomórficos. Esto significa que aparecen con igual geometría pero dispuesta
en sentido inverso (dextrorso y sinistrorso), como si de una simetría especular
se tratara. Por ejemplo, la mano izquierda y la mano derecha son enantiomórficas,
ya que son idénticas sin ser superponibles.
␣ Módulos elementales tensegríticos pueden ser ensamblados
juntos para así conformar torres, emparrillados o conglomerados tensegríticos
compuestos por iguales o distintas figuras elementales.
␣ Cuanto mayor sea el pretensado de un sistema
tensegrítico, mayor será su capacidad portante o resistente.
␣ El grado de tesado del pretensado es directamente
proporcional a la cantidad de espacio ocupado.
␣ Debido a que los componentes a compresión son
discontinuos, sólo trabajan localmente; la compresión está ceñida a líneas de
acción cortas y específicas, luego éstos no son susceptibles de colapsar por
pandeo.
␣ Por la razón argüida en el punto anterior, la
discontinuidad de los esfuerzos de compresión, las tensegridades no sufren
torsión alguna.
␣ Poseen la propiedad de la sinergia, donde el
comportamiento de todo el conjunto no es predecible a partir del comportamiento
de sus componentes considerados individualmente.
␣ La resiliencia o rigidez de la estructura depende de los
materiales empleados y de su modo de ensamblarlos, pudiendo resultar, en
función de ellos, muy flexibles y maleables o de gran rigidez y firmeza.
␣ Debido a esta característica, son muy sensibles a las
vibraciones, especialmente bajo cargas dinámicas. ␣ Tienen la capacidad de responder globalmente como un
todo, por lo que cualquier carga puntual a la que se les
someta es transmitida uniformemente y
absorbida por toda la estructura.
␣ La "elasticidad multiplicativa" es una
propiedad inherente a las tensegridades: cuando se separan dos barras una
cierta distancia, el acortamiento de los tendones es muchísimo menor que esta
distancia.
␣ La respuesta a las cargas impuestas es no lineal. Como
resultado, son más flexibles a cargas moderadas, pero su rigidez aumenta
rápidamente a medida que dicha fuerza aumenta, como le sucede a los puentes
colgantes.
␣ Algunas tensegridades, bajo
cargas axiales, experimentan una rotación de sus elementos en torno a dicho
eje. El sentido de la rotación depende del tipo de enantiomorfismo de la figura
(dextrorso o sinistrorso).